Bionic hands hold the promise of greatly restored capabilities but their myoelectric control systems are not as reliable as they need to be.
First, a Little Optimism…
Much of this post contains negative information about bionic hands but we don’t have a negative view of them. We fully believe that they’ll eventually restore near-natural capabilities to those with upper limb differences. For example, consider this short video by Myoelectric Outdoors on making breakfast using a TASKA Prosthetics Hand:
For these 53 seconds, can anyone doubt that this person benefits from having a bionic hand?
With a little homework and a lot of hard work, you can experience similar results. That’s the good news. But, first, you’ll need to steer around a few pitfalls.
The Problems With Myoelectric Control Systems
Background
Most commercial bionic hands currently utilize a dual-site myoelectric sensor system to implement user control. Two sensors are placed on the residual limb’s skin to detect different muscle movements via electrical signals. One muscle movement triggers a close action in the bionic hand, while the other triggers an open action.
Exactly which bionic digits open and close depends on the hand’s selected grip pattern. For example, in a pinch grip, the close action causes the thumb and forefinger to pinch together. In a hook grip, the four fingers close while the thumb gets out of the way.
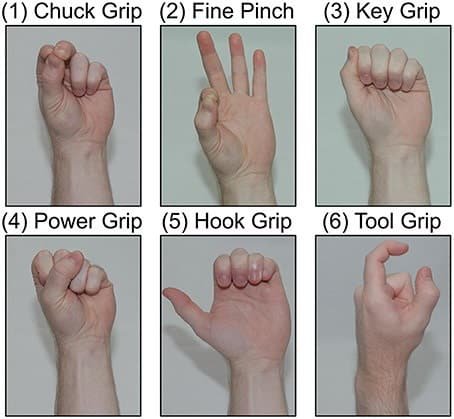
Source: https://www.researchgate.net/figure/Tested-hand-grasp-patterns
Most bionic hands support multiple grip patterns. Users can rotate between these patterns by using various methods such as clenching both control muscles simultaneously (known as a “co-contraction”).
These types of dual-site systems are referred to as “direct control” because the user must directly and explicitly control each of the hand’s actions.
Unfortunately, there are numerous problems with this approach.
User Dissatisfaction with Dual-Site Myoelectric Control Systems
In a 2019 European study1, 15 prosthesis users and 7 therapists were interviewed about their perceptions of bionic hands. Their responses were classified according to specific themes and subthemes. Here’s a subset of the results:
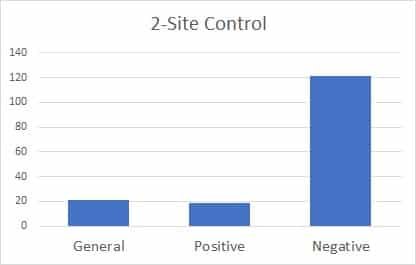
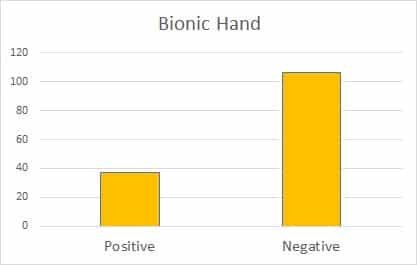
Notice that the perceptions were decidedly negative.
We have not been able to find a large enough study to provide reliable statistics on user satisfaction with dual-site control systems specifically. However, we did find two additional studies of relevance.
In a 2020 study2 involving survey responses from 25 amputees, 92 % of which used myoelectric devices, it was found that 44 % of users had rejected their devices. A lack of function was one of the reasons cited for abandonment in 50 % of the rejections (the others being weight and lack of comfort).
Note, however, that 72 % of respondents involved in this survey had amputations either at or above the elbow, which do historically result in higher rates of rejection.
In another 2020 study3, 449 users of upper limb prostheses were surveyed regarding overall device satisfaction. Devices were:
- 74 % body-powered;
- 21 % myoelectric or hybrid;
- 5 % cosmetics.
As the participants in this study were all military veterans who received their devices between 2010 and 2015, the myoelectric subgroup likely used single- or dual-site control systems.
In a bit of a shock, this survey found no difference in satisfaction by device or degrees of freedom (i.e. the different ways a device can move) between myoelectric, body-powered, and purely cosmetic devices.
Think about that for a moment. Despite the technological advances in bionic hands over the past two decades, users were no more satisfied with their functionality than they were with body-powered technology that has been around since 1812!
Looping back to the first study for a moment, their conclusions are similar:
“Prosthesis users and therapists described multi-function upper limb prostheses as more functional devices than conventional one-degree-of-freedom prostheses. Nonetheless, the prostheses were seldom used to actively grasp and manipulate objects. Moreover, the participants clearly expressed their dissatisfaction with the mechanical robustness of the devices and with the process of switching prosthesis function under conventional control.”
Further, indirect proof of this dissatisfaction comes from Alix Chadwell’s impressive 2018 thesis titled “The Reality of Myoelectric Prostheses: How do EMG skill, unpredictability of prosthesis response, and delays impact on user functionality and everyday prosthesis use?”4
As part of her studies, she gave participants with a unilateral limb absence wrist sensors to monitor their at-home use of their myoelectric versus anatomical arms. Users overwhelmingly favored their anatomical arm.
Finally, if you want visual proof of this problem, check out this video from a study conducted by Yale University in April 2021. Researchers attached POV cameras to 8 amputees using 13 different hand prostheses, including body-powered devices, electric terminal devices, and multi-articulating bionic hands. Here is a small example of the resulting footage:
Afterward, they analyzed 16 hours of this footage to assess how often the prostheses were being used and in what manner. Here are some of the study’s key observations:
- Prostheses were used on average for only 19% of all recorded manipulations, which is about 1/4 the rate that natural hands are used.
- Transradial amputees with body-powered devices used their devices for 28% of all manipulations versus only 19% for transradial users with myoelectric devices. Yes, you read that correctly. Body-powered devices were used more frequently than bionic devices.
- 79% of body-powered device usage did not involve grasping versus 60% of bionic hands. This is the one bright spot for bionic hands. When they were used, they were used more frequently for grasping than their body-powered counterparts.
- Multi-articulating bionic hands did NOT result in increased prosthesis use for transradial amputees compared to electric terminal devices such as powered hooks.
These studies represent the experiences of real users in normal settings, as compared to what is shown in bionic hand commercials. And they all overwhelming point to one conclusion: if our goal is to restore near-natural capabilities, we still have a long way to go!
The Main Factors Affecting Myoelectric Control
In her thesis, Chadwell identified three key factors affecting the control of a myoelectric arm (please note that I am paraphrasing here for simplicity):
- the ability of the user to generate clear muscle signals at the sensor sites;
- the unpredictability of the sensors’ ability to detect myoelectric signals, which is heavily affected by the quality of contact between the sensors and the skin;
- the electromechanical delay in the bionic hand’s response to detected signals.
Let’s examine each of these factors on its own.
Factor #1: The Ability to Generate Clear Myoelectric Signals
In cases where the residual forearm is mostly intact, generating strong muscle signals may be as intuitive as mimicking the open and close actions of a natural hand.
When the forearm is not intact or is heavily damaged, users may be asked to use alternative muscles that require a lot more concentration and discipline. As with almost every physical activity, the ability to do this may vary significantly from person to person.
Factor #2: The Unpredictability of Skin Surface Sensors in Detecting Myoelectric Signals
For myoelectric sensors to work properly, they need to maintain reliable contact with the skin. This is challenging enough in a static environment such as a laboratory or prosthetist’s office. Real-life environments pose several additional challenges:
| Challenge | Description |
| Limb position | In the real world, users attempt to use their bionic hands from a multitude of arm positions or while moving their arms. These changes in position/movement can negatively impact myoelectric control. Since the muscles used for prosthetic control do other things, certain arm movements may also trigger unintended actions in the bionic device. |
| Contraction intensity | The intensity of muscle contractions subconsciously varies according to the anticipated effort. For example, most people expect that picking up an iron bar will require a lot more effort than picking up a stick, even though the actions of the bionic hand may not differ. Again, this can cause confusion between the actual vs anticipated signals. |
| Electrode shift | Electrodes sometimes shift positions relative to the muscle structures they are supposed to monitor. This directly impacts the quality of signal detection. |
| Within/between day | Myoelectric signals are sensitive to changes in temperature, blood flow, the presence of sweat, etc. These changes may not be present when a prosthetist is calibrating a sensor control system. |
Scientists are attempting to overcome these challenges with increasingly sophisticated techniques, including:
- pattern recognition using additional sensors;
- enhancement of signal interpretation via artificial intelligence, such as machine learning;
- invasive techniques like surgically implanted sensors.
Unfortunately, the real world is proving to be a difficult challenge. A 2020 study5 indicates that pattern recognition accuracy declines by 13 % for limb position, and 20 % for contraction intensity, in real-world scenarios vs controlled environments.
Keeping in mind that pattern recognition accuracy in a controlled environment may be as high as 95 %, this means that the accuracy in a real-world environment might decline to less than 80 %.
According to a 2005 study6, typical users may attempt 1,200 grasping motions a day with a bionic hand. If the accuracy rate of the myoelectric control system is only 80 %, i.e. an error rate of 20 %, this equates to hundreds of errors per day.
Factor #3: The Electromechanical Delay in a Bionic Hand’s Response to Detected Signals
When a person uses his or her natural hand, there is a delay of roughly 200 milliseconds between the time the brain issues the signal and when the hand acts upon it. More importantly to the “user”, there is no noticeable delay between the decision to act and the response.
Response times for bionic hands can be double or even triple this depending on the user and/or task. Even where the difference is smaller, it is often compounded by other delays. For example, without a sense of touch, users must visually guide their hands through each motion, which is much slower than adjusting movements via tactile feedback.
These delays make control of a bionic hand much clumsier than that of its natural counterpart.
Overcoming the Problems with Myoelectric Control Systems
Now that you have a better understanding of the challenges when using a myoelectric control system, it’s time to describe the solutions.
Solution #1: Build Your Muscle Control From the Ground Up
If you scour research papers on myoelectric systems, you will not get a very clear sense of the training required to maximize your muscle control. Results often seem contradictory, with users plateauing or sometimes even regressing fairly early in the training process.
However, we found a study on multi-session game-based training7, that seems to point to a more convincing way forward.
In this study, 30 participants underwent 10 training sessions of 30 minutes each over multiple days. A training game was used to keep the participants’ interest. Of particular note, assessments were focused more on the “foundational aspects of muscle control”, rather than testing functional prosthesis use.
We’re not going to share all of the results with you because you need to read the full study for proper context, but here is one quick example:
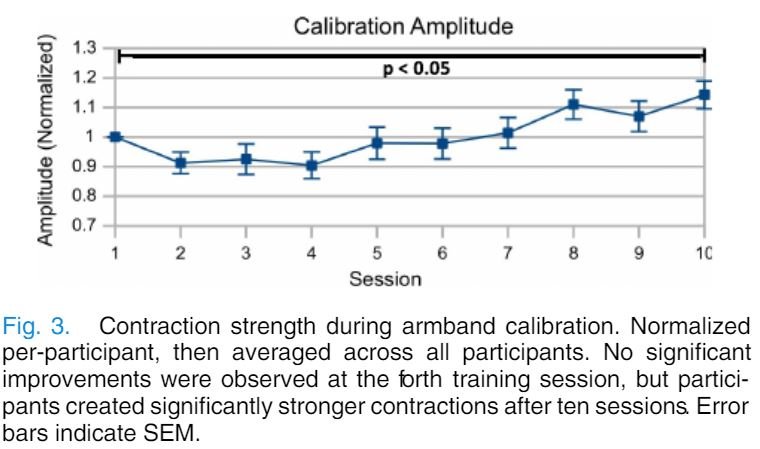
Notice the delayed return on investment until the fifth training session?
This next example measures the speed and accuracy of myoelectric control:
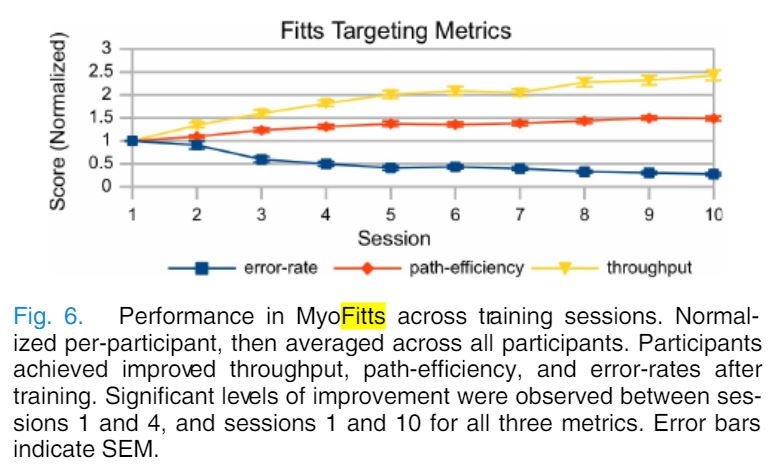
Again, you need to read the study to properly understand these results. The main point is that participants continued to steadily improve, for all ten training sessions, on key measures such as throughput and error rate. Would this improvement continue with additional training?
You can read the full study here: Evaluation of Myoelectric Control Learning Using Multi-Session Game-Based Training.
The main takeaway from this section is that if you are struggling to generate the muscle signals needed to control a myoelectric arm, don’t accept that you’ve reached your full potential just because you’ve plateaued using traditional training methods. Talk to your prosthetist about the preceding study to explore how you can do more. You may even want to undergo this training before selecting your bionic hand and/or control system to make sure that you’re testing against your fully trained muscles.
Solution #2: Insist on a Highly Personalized Bionic Arm System
As you now know, ensuring the best possible contact between myoelectric sensors and your skin is crucial for maximizing myoelectric control.
As you also likely know, residual limbs are like fingerprints — no two are alike. This is also true of people, the tasks they need or want to perform, and the environments in which they operate.
It is also true of bionic arm systems. Sensors can vary in both quality and cost. The control systems that process and interpret sensor signals — the secret sauce of many bionic hand systems — also vary tremendously.
If you put all of these varying factors together, there is only one possible conclusion: you need a highly personalized bionic arm system.
How do you get this? At the very least, you need:
- a socket system that perfectly matches your residual limb and takes into account your working/living environments;
- an opportunity to experiment with different myoelectric arms so that you can experience the strengths and weaknesses of each before making a purchase decision;
- a chance to test your myoelectric arm and your socket in real-world conditions as part of the initial configuration process.
How do you get this kind of personal attention? Simple. You need a prosthetist who acknowledges the weaknesses of myoelectric control systems and is willing to put in the time and effort to help overcome them.
Solution #3: Choose a Bionic Arm That Has Solved the Delayed Response Problem
We love problems that other people have already solved. Have a quick look at this video, which demonstrates near-natural bionic hand speed…
…and this one demonstrating the use of tactile feedback, which this bionic hand achieves by embedding pressure sensors in its fingertips:
In both cases, the bionic hand in question is the Psyonic Ability Hand.
To be clear, we don’t advocate for specific bionic devices. Our point in showing you these videos is to make you aware that solutions to the delayed response problem are already here. Given the way our competitive markets work, other bionic manufacturers either already have these capabilities or are likely working on them.
Knowing this, you should insist on finding out where your candidate bionic arms are in the development cycle. After all, it would be a shame if you took delivery of one model of a device only to find out that a soon-to-be-released version will have these important upgrades.
Solution #4: It May Be Time to Skip Direct Control and Go To the Latest Pattern Recognition Systems
As mentioned earlier in this article, pattern recognition systems that utilize skin-surface myoelectric sensors have some of the same problems as dual-site systems in real-world environments.
However, some of the newer pattern recognition systems are starting to address these issues through mobile applications capable of recalibrating the systems “on the fly”.
If you are considering one of the component hands, i.e. hands that are not married to proprietary direct-control myoelectric systems, it may be time to pressure your prosthetist into exploring the latest pattern recognition options.
Bonus Tip: Talk to Others With Bionic Hand Experience
There is nothing as valuable as honest firsthand experience, especially when it comes to shopping for a bionic hand. How can you access this experience? Not through your prosthetist or a device manufacturer. There’s nothing nefarious about this statement. It’s just a simple human fact that, when asked for references, people tend to direct you to positive reviews only.
What you need is more balanced feedback. To get it, turn to your local charities and support groups for amputees and others with limb differences. Join one of the many Facebook amputee groups and post some questions or ask for advice. Don’t stop until you have talked to people that a) have a limb difference similar to your own and b) have experience operating a bionic hand using a myoelectric control system.
When you do this, make a list of everything that has annoyed or frustrated them. You’re about to navigate a long journey toward your ideal bionic hand so you might as well know the pitfalls ahead of time!
Finally, we strongly recommend that you spend a bit of time watching the videos on the website mentioned at the start of this article, Myoelectric Outdoors. There are few people in the world with as much firsthand experience using myoelectric arms as the creator of that channel, and even fewer who can share their knowledge in such an accessible manner.
Related Information
For alternatives to direct control myoelectric devices, see myoelectric pattern recognition, advanced neural interfaces, and Agonist-antagonist Myoneural Interface (AMI).
For a complete description of all current upper-limb technologies, devices, and research, see our comprehensive guide.
References
[1] Franzke AW, Kristoffersen MB, Bongers RM, Murgia A, PobatschnigB, Unglaube F, et al. (2019) Users’ and therapists’ perceptions of myoelectric multi-function upper limb prostheses with conventional and pattern recognition control. PLoS ONE 14(8):e0220899.
[2] Stefan Salminger, Heiko Stino, Lukas H. Pichler, Clemens Gstoettner, Agnes Sturma , Johannes A. Mayer , Michael Szivak & Oskar C. Aszmann (2020): Current rates of prosthetic usage in upper-limb amputees – have innovations had an impact on device acceptance?, Disability and Rehabilitation, DOI: 10.1080/09638288.2020.1866684.
[3] Resnik, Linda & Borgia, Matthew & Heinemann, Allen & Clark, Melissa. (2020). Prosthesis satisfaction in a national sample of Veterans with upper limb amputation. Prosthetics and Orthotics International. 44. 030936461989520. 10.1177/0309364619895201.
[4] Chadwell, Alix. University of Salford. (2020). The Reality of Myoelectric Prostheses:
How do EMG skill, unpredictability of prosthesis response, and delays impact on user functionality and everyday prosthesis use?
[5] Campbell, Evan & Phinyomark, Angkoon & Scheme, Erik. (2020). Current Trends and Confounding Factors in Myoelectric Control: Limb Position and Contraction Intensity. 10.20944/preprints202002.0415.v1.
[6] Limehouse, J.W.. (2005). A preliminary study of 40+ upper extremity patients using the animated control system. Myoelectric Controls/Powered Prosthetics Symposium.
[7] Tabor, Aaron & Bateman, Scott & Scheme, Erik. (2018). Evaluation of Myoelectric Control Learning Using Multi-Session Game-Based Training. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 26. 1-1. 10.1109/TNSRE.2018.2855561.