IBT’s Sense is another complete, proven, but expensive pattern recognition system that raises a familiar question: is it worth it?
A Quick Look at the Sense Pattern Recognition System
The following video provides a brief glimpse of the Sense pattern recognition system in action:
This next short video provides a more complete description of some of Sense’s features:
And this one shows the same user using his device for a set of daily tasks:
Before reading further, a little background information may be helpful. To obtain this, please see our master article Myoelectric Pattern Recognition for Bionic Arms & Hands, which includes a basic description of how pattern recognition systems work.
As that article indicates, there are a few key areas crucial to the success of any myoelectric pattern recognition system. These are:
- basic technology;
- evaluation support;
- setup & calibration;
- training;
- recalibration by the end-user.
We will examine Sense in each of these areas.
Basic Technology
There is a spectrum of pattern recognition technologies:
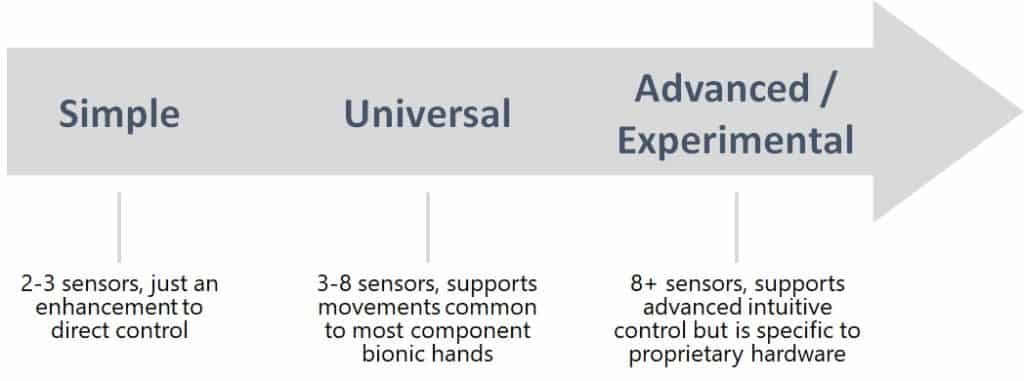
A simple system may use some form of pattern recognition or artificial intelligence to clean up myoelectric signals but its focus is still on basic bionic hand actions like open and close. We like to think of this mainly as an enhancement to direct control.
Universal systems offer a more complete system of pattern recognition, one that can map patterns of muscle movements to various bionic commands, including the movement of multiple bionic joints at the same time. We call these systems “universal” because they are capable of interfacing with different types of bionic components from different manufacturers.
IBT’s Sense is a universal system. It is meant to be used with 3-8 sensors and can be combined with bionic components from different manufacturers to form an overall solution.
Because Sense must support the functionality common to these components, it does not attempt to match the advanced capabilities of some of the more experimental pattern recognition systems on the horizon, which may allow spontaneous control over individual bionic finger movements.
Instead, Sense supports the movements allowed by whatever components it is attempting to control.
How does Sense do this? Let’s walk you through the typical chronology of its evaluation, configuration, and subsequent use.
Evaluation Support
The first step for a prospective user is to evaluate whether he can benefit from Sense.
IBT supports this by providing loaner kits to prosthetists. These kits contain sensors, a control system, and software that allow prosthetists to test the suitability of prospective Sense users without having to fabricate complete physical test systems. Prosthetists can temporarily apply the sensors to a user’s residual limb and then use Sense’s calibration and training software to test the solution virtually.
There is no difference in the software setup, calibration, and training of a virtual user versus one who has an actual bionic prosthesis.
Setup & Calibration
We’re not going to cover the physical setup of Sense here. The prosthetist will take care of that. We’re going to start at the point where the physical setup is complete and the prosthetist is ready to use the software with a specific user.
Although this video was created for prosthetists, we urge end-users to watch it to get a better understanding of Sense’s capabilities:
The key takeaways from this video are:
- The prosthetist has precise control over which sensors are used to detect patterns and which patterns are paired with specific movements by a bionic component.
- The available actions for each bionic component are dictated by the components themselves (e.g. a TASKA hand will have different grip patterns than an i-Limb).
- The pattern correlating to each movement can have multiple variations based on arm position. This helps address one of the main problems with any myoelectric device — that different arm positions can degrade signal detection.
- Though not shown in the video, prosthetists can also change the sensitivity of myoelectric sensors and the speed at which the bionic hand or joint moves in response to commands.
TRAINING
IBT places a great deal of emphasis on user training. Because of this, they provide an excellent virtual, game-based training software called MyoTrain, as shown in this video:
What can we say about this software? It seems incredibly thorough and valuable to both the prosthetist and the end-user. However, as with most things, the more that you put into it, the more you will get out of it.
To help you do this, IBT has also provided a very helpful training guide.
RECALIBRATION
After you have gone through an evaluation, had a socket built by your prosthetist, completed your training, and taken delivery of your complete bionic arm solution, you should be finished with Sense calibration, right?
Wrong. One of the challenges of myoelectric control systems, especially those dependent on skin-surface sensors, is that the state of a user’s residual limb is not constant. It can change with things like temperature (swells when hot, shrinks when cold), humidity (skin sweat), and muscle fatigue.
When this happens, users need the ability to quickly recalibrate their Sense system:
This type of user ability to adjust “on the fly” is critical to the success of any myoelectric pattern recognition system.
Note, however, that his recalibration process is not as convenient as Coapt Gen2‘s push-button recalibration for some situations.
RELATED PRODUCTS
We don’t normally cover products that are components of bionic limb or pattern recognition systems, but we do think it’s worth mentioning that IBT has a full range of products related to bionic arms & hands, including:
- FlexCell batteries. Just like they sound, these batteries are flexible. They’re also quite thin. Both qualities allow them to fit more easily into sockets and to conform to the shape of those sockets, which makes for a better socket fit — a key requirement for bionic upper limbs.
- Element myoelectric sensors. Again, designed specifically for incorporation into upper-limb sockets.
- Morph Lock. A control mechanism that automatically shuts off user input to a bionic hand when the hand is passed within the range of an RFID chip. This helps users avoid dropping items by inadvertently triggering an open signal.
- Morph 2. A control mechanism that automatically switches grips when the hand is passed within the range of an RFID chip. This makes grip switching highly efficient and convenient for certain tasks. For example, putting an RFID chip near a computer keyboard can automatically switch a bionic hand into a pointer grip for one-finger typing.
Our point in mentioning these additional products is that IBT is a company that specializes in all aspects of user control for upper-limb bionics. In the looming battle between universal control systems like Sense and the proprietary pattern recognition systems being built into some of the new bionic arms/hands, these added capabilities should be considered, though we currently have no basis to weigh their importance.
User Feedback Survey & Results
Are you or have you previously been an IBT Sense user? If so, please share your insights with others looking at Sense as a possible pattern recognition system.
Survey
Results
We do not yet have a sufficient number of survey participants to publish fair and accurate results for the IBT Sense system.
As soon as we do, we’ll update this section.
Considerations Before Buying IBT’s Sense
IBT is an excellent company. They have been exceptionally open and helpful with us in putting together this article, which we view as a sign of respect for end-users since that is our primary audience.
We can also say that Sense checks all the boxes as a complete myoelectric pattern recognition system.
What we cannot do is make any kind of statement about the effectiveness of Sense because we lack sufficient user feedback to do so.
Nor can we fairly compare Sense to its main competitor, Coapt’s Gen2, because, again, we need end-users to deliver that verdict. But, as with Gen2, we believe that the cost-benefit analysis for Sense is much more complex now than it would have been even just two years ago, especially for below-the-elbow solutions. We say this because a lot of new, more capable bionic hands are entering the market with their own built-in pattern recognition systems. And when you look at the cost of some of these new devices versus the cost of a mainstream bionic hand plus a universal pattern recognition system, well, the winner is not yet apparent.
Part of this is going to come down to sheer capability. Some of the new bionic arms/hands, such as the Atom Touch (due out in 2023), promise to shatter the current limits of upper-limb technologies. To compete against these advanced proprietary systems, both IBT and Coapt are going to have to do a lot better job of showing what their systems can do by making better videos. And we don’t mean videos of ETDs simply opening and closing. We mean videos showing multi-articulating bionic hands performing more challenging daily tasks. Because such videos already exist for some of the new proprietary systems, with many more on the way.
Related Information
If you want to read more on the debate over universal pattern recognition systems like Sense versus the new proprietary PR systems now emerging, see Which Myoelectric Pattern Recognition System is Right for You?
If you are considering a dual-site, direct-control myoelectric system, do not miss our article on Finding the Right Myoelectric Control System.
For a comprehensive description of all current upper-limb technologies, devices, and research, see A Complete Guide to Bionic Arms & Hands.
Click here for more information on Infinite Biomedical Technologies.